
 产品:16
产品:16
 联系我们
联系我们

埃斯顿国产六轴机器人
一 重复定位精度(重复性):
重复定位精度主要取决于Drive Chain的精度。目前工业机器人几乎全部采用17位电机编码器+高精度减速机。只要结构件的刚度不太差,安装水平不太低,重复定位精度就不会太低,这与下面楼层的控制系统关系不大。
有很多方法可以测试重复定位精度。激光跟踪仪是土豪劣绅的选择。如果经济实惠,可以选择使用千分表制作正交测量装置,例如:
埃斯顿机器人测试模式
二 姿势精度:
位姿精度一般是指位姿的重复性,表示机器人从同一方向对同一指令位姿作出n次响应后位姿的一致性
为了达到较高的位置精度,控制系统需要提供以下功能:
补偿机械连杆的运动参数误差,如连杆加工误差,装配误差、机械公差等;
补偿接头柔度和连杆柔度;
具有高精度机械校零功能;
如果某一控制系统能将埃斯顿机器人在整个工作空间内的位姿精度控制在±1mm以下,基本上是一个非常强大的水平。
三 路径精度:
一般是指路径重复的精度,即机器人重复n次相同的轨迹指令时,轨迹的一致性。
简单的测试方法是让机器人行走一定的轨迹n次,然后取由n条轨迹组成的轨迹杆半径横切面。试验设备激光跟踪仪使用方便
为了获得高的路径精度,基于模型的控制是必要的
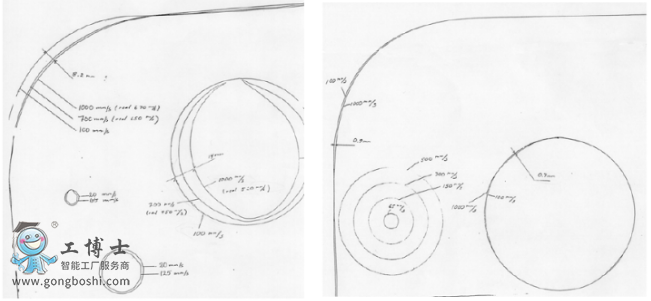
四 埃斯顿机器人参考
右侧采用基于模型的控制,可以看出机器人在转弯区域、圆弧等曲率较大的路径上保持了很好的轨迹精度。这是ABB中Quick Move和True Move的比较演示。采用模型控制后,可以保证机器人在系统允许的任何速度下都能保持很高的路径一致性。
基于模型的控制可以简单理解为通用动力学控制,它将关节间的科氏力、惯性和重力解耦前馈控制,在不超过各关节力矩约束的情况下进行轨迹规划,从而***大限度地提高伺服电机的性能,提高运动速度,保证轨迹精度。
另外,当埃斯顿机器人的速度相对较慢或路径较短时,关节经常通过“0”速度点,摩擦力的影响会变得更大,因此为了获得足够的路径精度,关节摩擦力应进行补偿。工厂的关节摩擦补偿功能开启后,*high可以将机器人在路径上的精度提高到正负0.1mm!
更多咨询 埃斯顿机器人
- 下一篇:两会聚焦工业机器人—埃斯顿机器人
- 上一篇:埃斯顿机器人的驱动方式